下ノ村 和弘
理工学部 ロボティクス学科 教授
ビジョンを中心としたセンシング技術・ロボット知能化技術の研究を行っています。センサデバイスやカメラ、画像処理アルゴリズムの開発、ロボット制御や生体情報計測への応用、また、生体視覚系のモデリングなどのテーマに取り組んでいます。
研究テーマ
ビジョンを中心としたセンシング技術とロボット知能化技術
ビジョンを中心としたセンシング技術とロボット知能化技術
生体視覚系をモデルにしたビジョンセンサ
ビジョンベースロボット運動制御
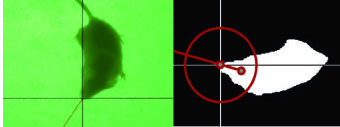
マウス視線方向計測
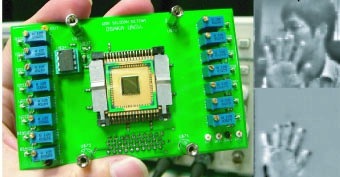
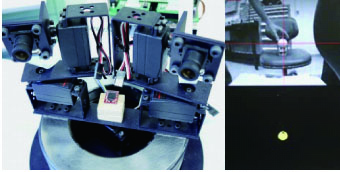
ロボットが外界の情報を知るためのセンサ技術について、特にビジョン(視覚)技術を中心に、センサデバイスの開発からロボット制御への応用まで幅広く研究を行っています。具体的には、生体視覚系をモデルにした知能イメージセンサ(ビジョンチップ)の開発と応用、視覚情報に基づいて空中ロボットやロボットアームを制御するためのビジョンハードウェアと制御アルゴリズムの開発、歩行ロボットのような揺れるプラットフォームに搭載されたカメラ映像の安定化、光学式接触センシングとロボット把持制御への応用などのテーマに取り組んでいます。また、本プロジェクトでは、マウス行動実験のための実験装置の構築や、画像よる行動解析にも取り組んでいます。
メンバー一覧
天野 晃
上野 博
岡田 志麻
川村 貞夫
川村 晃久
北野 勝則
北岡 明佳
木津川 尚史
小池 千恵子
七田 芳則
篠田 博之
下ノ村 和弘
白壁 恭子
立花 政夫
坪 泰宏
中山 勝文
徳田 功
松本 彰弘
三品 昌美
和田 有史
瀬谷 安弘
高橋 政代
竹田 有加里
塚本 吉彦
西田 明弘
Steve H. DeVries
ページの先頭へ戻る